2021年3月,英国罗尔斯·罗伊斯公司(以下简称罗罗公司)高管透露,该公司获得英国国防部资助,以进一步研发和演示“人工轮机长”技术。该技术利用人工智能操控无人船舶航行,可使船舶在被较少干预的情况下执行长航时任务,提高无人水面舰船执行长期任务的能力。

图1 罗罗公司关于“人工轮机长”技术的宣传图
一、研制背景与历程
现代舰船通常需要多个子系统共同进行有效、高效、安全的操作,如推进系统、电子系统、燃料系统等。军用高速、长航时自主水面舰船的子系统较为复杂,对自主操控的要求远超当前商用无人水面艇的能力。此外,中型、大型舰船通常还会为动力、电子等系统配备多套设备,留有一定的冗余度,增加了自主操控系统调度各子系统的难度。因此,2016年,罗罗公司在芬兰技术与创新资金局“先进自主水上应用”(AAWA)项目资助下,开始研发舰船自主导航技术。2018年初,罗罗公司与费法瑞公司合作开展“自主导航安全舰船”(SVAN)项目,将AAWA项目的研发成果转化为水面舰船自主操控系统,以应对上述挑战。
2018年12月,罗罗公司在芬兰库尔图市南边群岛,成功演示了搭载自主操控系统的渡轮在两个港口间的自主航行、障碍物与碰撞规避,标志着其自主操控系统完成研发并具有一定自主能力。2019年在英国国际防务展上,罗罗公司正式展出该系统,并将其命名为“人工轮机长”。2021年3月,“人工轮机长”系统获得英国国防与安全加速器“智能舰艇第二阶段”计划资助,将通过为期16个月的研发,改善“人工轮机长”的人机交互与协作能力,提高决策和规划水平,以应对更复杂的作战环境。
二、系统主要功能
“人工轮机长”是一种可实现无人驾驶水运船舶自动化操控的自主控制系统,可根据人工输入的船舶任务计划,编制满足任务计划的船舶机械配置方案(如发动机形式、动力系统配置、推进器配置等),并根据任务计划和最终选择的配置方案操控船舶。“人工轮机长”运行过程中,其自主船舶设备控制(AVEC)系统会持续不断地与船舶上各种机械与电子系统通信,以获取各项数据,再根据实时任务管理系统、长期舰队管理系统等约束条件,生成控制命令,操控船舶。AVEC系统同时还可以不断评估船舶的机械状态和健康情况,在发生机械故障等问题时,生成解决方案,以减轻故障对任务计划的影响。
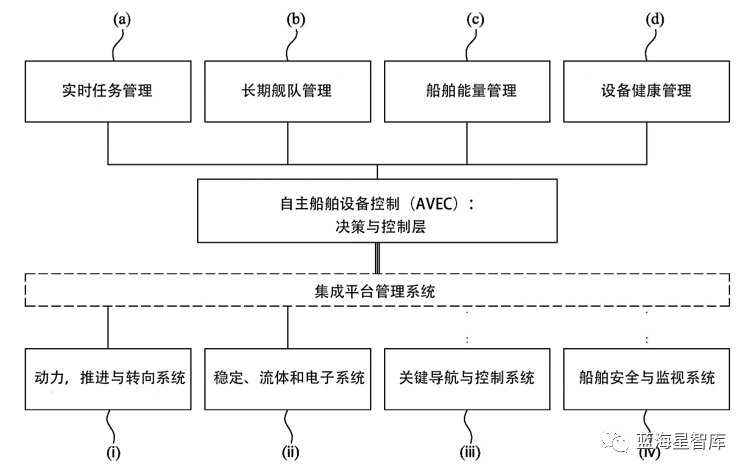
图2 “人工轮机长”功能框架
AVEC系统是“人工轮机长”系统的核心,核心功能是决策制定模块,其下包括执行感知功能的评估子模块、执行思考的决策子模块、产生执行命令的命令子模块,以及支撑这三个模块的规划子模块。决策制定模块通过通信管理模块获取各种系统的数据。AVEC系统通过轮机长接口接收输入命令,并保留了手动控制接口,以备特殊情况使用。数据记录器为决策制定模块、通信管理、轮机长接口提供各种事件记录功能;安全系统则截取AVEC内部通信,与数据记录比对,判别是否存在入侵行为。
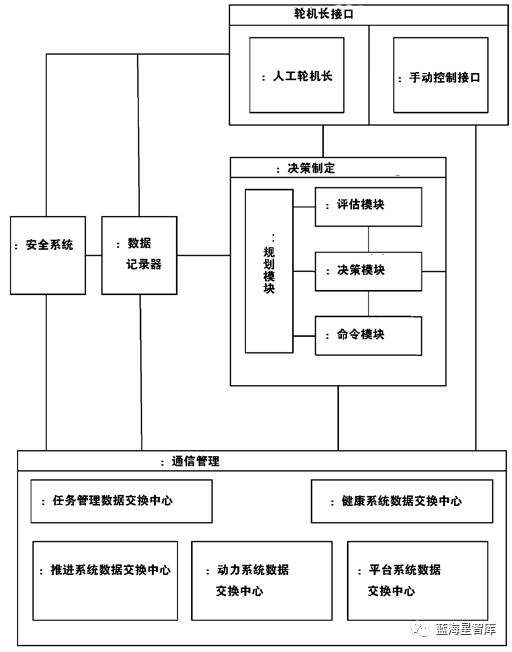
图3 自主船舶设备控制实施模型
三、影响意义
此次罗罗公司获得英国国防部国防与安全加速器资助,将加速“人工轮机长”技术的发展与成熟。未来“人工轮机长”系统部署运用后,将产生以下影响:
一是提升英国皇家海军无人舰艇远征航行能力。“人工轮机长”系统的设计初衷是应用在无人运输船只上,提高船只长期航行能力。但根据罗罗公司披露,这套系统不仅可以用于水面船只,也可用于无人潜航器,提高无人舰艇及其编队的长期自主航行能力。搭载“人工轮机长”的英国皇家海军无人舰艇,将具备远距离自主航行能力,以编队形式行动时,可以大幅增强英国皇家海军的远征运输和补给能力。
二是提高英国皇家海军舰船生存能力。“人工轮机长”的AVEC系统具有应对机械故障和一些突发问题的能力。根据罗罗公司披露,AVEC系统若应用在皇家海军舰艇上,可根据预先输入的一些机械故障、紧急情况定义(如船上火灾),拟制并实施应对措施,从而一定程度上提高舰船生存能力。
